[ad_1]
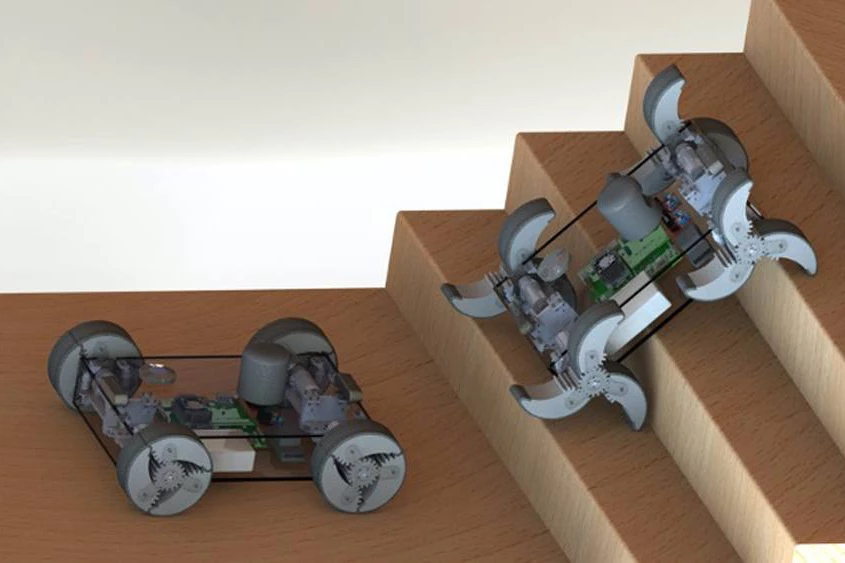
Of the thousands of constraints and design decisions to consider when building a robot, the way it moves is perhaps one of the most fundamental. The method of motion limits the design and use case of the robot perhaps more than any other parameter. A team of Texas A&M researchers led by [Kiju Lee] is trying to have his cake and eat it too by building a robot with wheels that turn into legs, known as a-WaLTR (Adaptable Wheel-and-Leg Transformable Robot).
a-WaLTR was designed to overcome one of the biggest obstacles of robots on wheels: the stairs. By adding some smarts to determine if a given terrain is best handled by wheels or legs, a-WaLTR can convert its segmented wheels into simple legs. Rather than implementing complex and error-prone articulated legs, the team stuck with sturdy appendages that remind us a bit of whegs.
The team will showcase its prototype at the DARPA OFFSET Sprint-5 in February 2021, a program focused on building robots capable of forming adaptive human swarm teams.
Thanks to the rise of 3D printers and electronics for hobbyists, there are more open source experimental robot projects than ever. We’ve seen smaller versions of the popular Boston Dynamics Spot as well as simpler quadrupedal robots with more servos. a-WaLTR isn’t the first transforming robot we’ve seen, but we can’t wait to see more unique versions of robotic locomotion in the future.
Thanks to [Qes] for sending this!
Source link
